Applications
Robotic tactile systems and electronic skin applications in humanoid robotics comprehensively enhance robot perception and response capabilities.
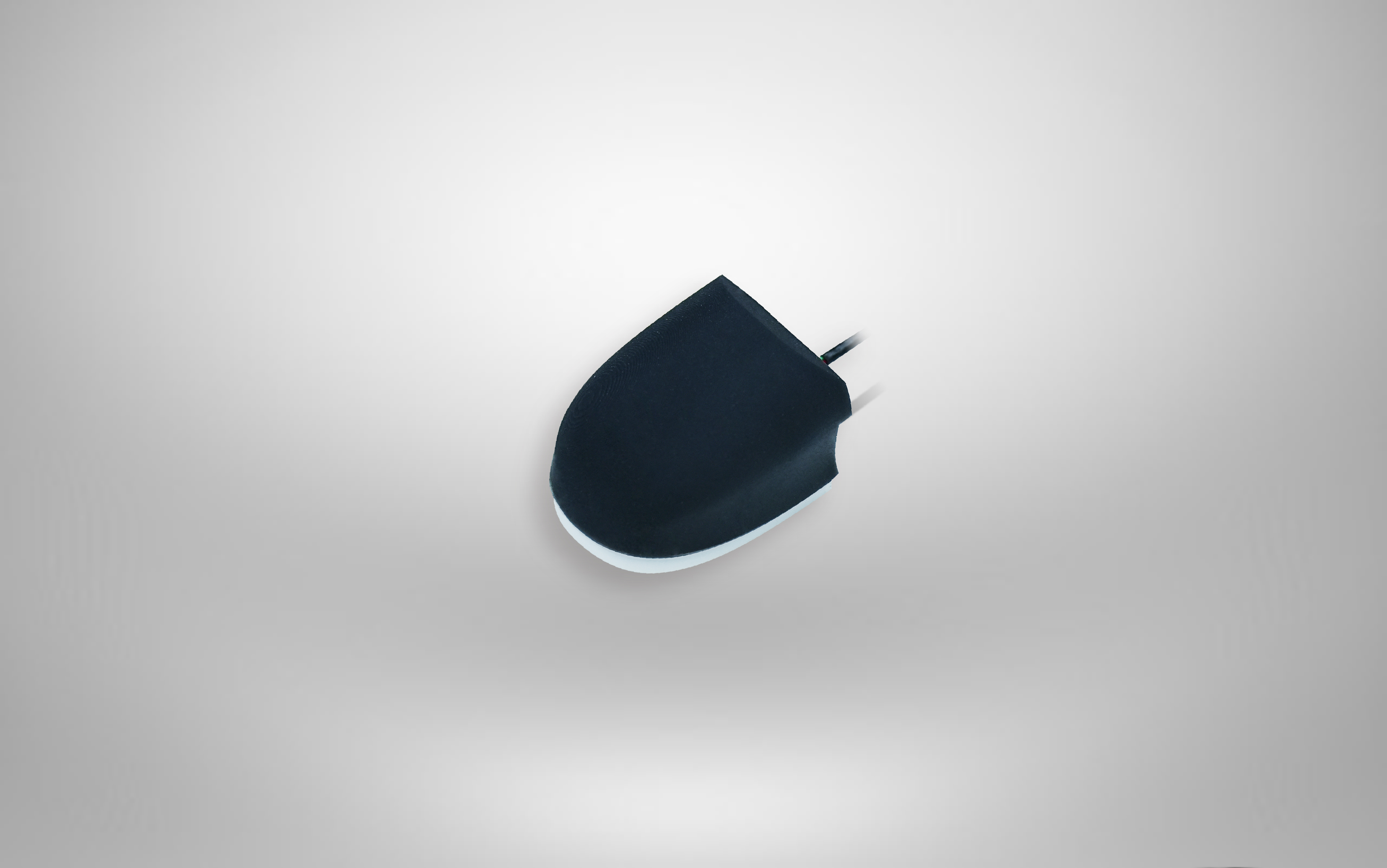
Fingertip and Finger Pad
High-sensitivity tactile feedback, particularly suitable for precision tasks, used for fine grasping, micro-object manipulation, and touch feedback.
Palm
Applied in heavy object handling and force control tasks, dynamic mechanical sensing, real-time feedback on grasping force and object weight.
Full-body Electronic Skin
Such as arms, legs, and other areas, helping robots achieve wide-range contact perception, enhancing humanoid robot dynamic environmental adaptability, detecting contact force and temperature changes with the environment.